Recibido: 12-03-2021
Aceptado: 10-04-2022
Publicado: 01-05-2022
Dennys Jackson Merchan Santisteban1*
![]() https://orcid.org/0000-0002-3481-0146
https://orcid.org/0000-0002-3481-0146
Kirenia Maldonado Zuñiga2
![]() https://orcid.org/0000-0002-3764-5633
https://orcid.org/0000-0002-3764-5633
Dayana Lilibeth Pérez Chilán3
![]() https://orcid.org/0000-0001-8099-7645
https://orcid.org/0000-0001-8099-7645
Volumen: 6
Número: 3
Año: 2022
Paginación: 98-107
URL: https://revistas.unesum.edu.ec/index.php/unesumciencias/article/view/476
*Correspondencia autor: merchan-dennys7651@unesum.edu.ec

RESUMEN
Los autómatas del griego automatos, o ingenio mecánico que obra por sí mismo, han sido objeto de deseo y fascinación para el hombre desde la antigüedad. Y a esta fascinación han contribuido algunos de los más grandes inventores de la historia, como Leonardo Da Vinci. Al hablar de autómatas se comprende como la tendencia actual que se está adaptando cada vez al medio de una forma rápida dando facilidades a las personas, porque pueden cumplir funciones riesgosas que una persona común no puede hacer, ofrecen muchas ventajas como son el ahorro de tiempo, precisión en el desarrollo de tareas complejas, mejora el aumento de la producción y contribuye a la seguridad de los empleados. Para el respectivo análisis se utilizaron los métodos de investigación científica, de tipo adjetivo e experimental apoyado de investigación en informes y en artículos, destacando que los resultados muestran cada una de las propuestas y el fin destacado que llevan los autómatas en la actualidad.
Palabras clave: adaptando, funciones, precisión, riesgosas, tendencia, ventajas.
ABSTRACT
The automatons of the Greek automatos, or mechanical ingenuity that works by itself, have been the object of desire and fascination for man since ancient times. And some of the greatest inventors in history, such as Leonardo Da Vinci, have contributed to this fascination. When talking about automata, it is understood as the current trend that is adapting to the environment in a rapid way each time giving facilities to people, because they can fulfill risky functions that an ordinary person cannot do, they offer many advantages such as saving time, precision in the development of complex tasks, improves the increase in production and contributes to the safety of employees. For the respective analysis, the methods of scientific research, adjectival and experimental type, supported by research in reports and articles, were used, highlighting that the results show each of the proposals and the outstanding purpose that automata carry today.
Keywords: adapting, functions, precision, risky, trend, advantages.
Introducción
En la actualidad y a raíz del increíble avance de las nuevas tecnologías y la ciencia, las máquinas autómatas son una realidad palpable con muchas de las cuales interactuamos diariamente y que por supuesto contribuyen en hacer la vida mucho más sencilla en algunas actividades.
La mayor parte de las personas tienen una idea de lo que es la robótica, sabe sus aplicaciones y el potencial que tienen, pero no conocen el origen de la palabra robot, ni tienen idea del origen de las aplicaciones útiles de la robótica como ciencia. La robótica como hoy en día se le conoce, tiene sus orígenes hace miles de años. Los robots eran conocidos con el nombre de autómatas, y la robótica no era reconocida como ciencia, es más, la palabra robot surgió hace mucho después del origen de los autómatas.
Los hombres creaban autómatas como un pasatiempo, eran creados con el fin de entretener a su creador. Destacando que cada material que se utiliza se encuentran al alcance de todo el mundo, utilizaban maderas resistentes, metales como el cobre y cualquier otro material moldeable, que no necesitara o requiriera de algún tipo de transformación para poder ser utilizado en la creación de los autómatas. Estos primeros autómatas utilizaban, principalmente, la fuerza bruta para poder realizar sus movimientos. A las primeras máquinas herramientas que ayudaron al hombre a facilitarle su trabajo no se les daba el nombre de autómata, sino más bien se les reconocía como simples máquinas.
Es por esto que este articulo define el avance que actualmente lleva la robótica, esta era tecnológica brinda maravillas que sólo se encontraban en sueños hace algunos años, pero todas estas ventajas son actualmente un factor esencial para grandes empresas o para cada una de las necesidades que se tiene en la vida.
Desarrollo
Para la respectiva investigación se han adquirido múltiples recursos de información tanto del país como del mundo, con el fin de dar un enfoque a la actualidad con la utilización de los autómatas.
¿Qué son los autómatas?
El usuario (Javier Echegoyen Olleta, 2018)explica que “En Inteligencia Artificial se llama autómata a cualquier mecanismo que es capaz de moverse por sí mismo. Si los autómatas se producen en serie tenemos los robots. Y, en el campo de la ficción, si el autómata tiene aspecto humano, tenemos los androides.”
El usuario anteriormente mencionado explica que cabe llamar autómata a toda máquina que sigue un programa de instrucciones diseñado por un programador. En este sentido, los ordenadores también son autómatas. Cabe hablar también de autómatas de propósito general o universal y de autómatas de propósito limitado. En el primer caso tenemos los ordenadores convencionales, que están construidos de tal forma que pueden programarse para resolver muchos tipos diferentes de problemas, y en el segundo los computadores diseñados para realizar una tarea específica, como nuestras calculadoras o el computador de un automóvil. Por extensión, también recibe el nombre de "autómata" el programa mismo, o la arquitectura computacional en la que descansa la ejecución del programa, como es el caso de la llamada "máquina de Turing". (Javier Echegoyen Olleta, 2018)
Finalidad de los autómatas
Según (Santiago C.) el principal fin de los autómatas es crear máquinas inteligentes las mismas que sean capaces de distinguir e incluso constatar el estado del entorno en el que se desenvuelven, considerando que actúen teniendo como referencia toda la información posible. Esto se hace dentro de un bucle básico de control el cual plantea una variedad de retos enfocados en las disciplinas de la electrónica, mecánica, matemática aplicada y especialmente la Informática, sin olvidar que la inteligencia artificial es base primordial.
Esto se puede resumir en los métodos los cuales se basan en las redes neuronales artificiales, estas técnicas evolutivas y algoritmos genéticos, realizando estudios que proporcionan soluciones para robots móviles con ruedas, articulados, modulares, aéreos sin dejar atrás los sistemas multi-robot los cuales están formados por equipos de robots de las características anteriormente mencionadas. (Santiago C.)
Historia de los autómatas
González Víctor R (2019) menciona que: La evolución de las TIC (Tecnologías de la Información y las Comunicaciones) en el último medio siglo podría sintetizarse diciendo simplemente que han pasado de ser tecnologías caras, complejas y orientadas a las grandes organizaciones, a intentar ser tecnologías baratas, sencillas y fácilmente utilizables por las personas en su vida cotidiana. La noción popular de robot hace referencia a un dispositivo humanoide con cierto grado de inteligencia, que substituye a las personas en la realización de tareas útiles.
Esta visión ha sido suscitada en gran medida por los numerosos relatos y ficciones cinematográficas que mencionan a los robots. De hecho, la palabra robot fue usada por primera vez en el año 1921, cuando el escritor checo Karel Capek (1890 - 1938) estrena en el teatro nacional de Praga su obra Rossum's Universal Robot (R.U.R.). Su origen es de la palabra eslava robota, que se refiere al trabajo realizado de manera forzada. (Víctor R. González, 2019)
Con el objetivo de diseñar una maquina flexible, adaptable al entorno y de fácil manejo, George Devol, pionero de La configuración de los primeros robots respondía a las denominadas configuraciones esférica y antropomórfica, de uso especialmente válido para la manipulación. En 1982, el profesor Makino de la Universidad Yamanashi de Japón, desarrolla el concepto de robot SCARA (Selective Compliance Assembly Robot Arm) que busca un robot con un número reducido en grados de libertad (3 o 4), un coste limitado y una configuración orientada al ensamblado de piezas. (Víctor R. González, 2019)
La introducción de los microprocesadores desde los años 70 ha hecho posible que la tecnología de los robots haya sufrido grandes avances, los modernos ordenadores han ofrecido un "cerebro" a los músculos de los robots mecánicos. Ha sido esta fusión de electrónica y mecánica la que ha hecho posible al moderno robot, los japoneses han acuñado el término "mecatrónica" para describir esta fusión. (Víctor R. González, 2019)
González Víctor (2019) explica que en: El año 1980 fue llamado "primer año de la era robótica" porque la producción de robots industriales aumentó ese año un 80% respecto del año anterior. Desde este año los robots se han expandido por varios tipos de industrias. El principal factor responsable de este crecimiento han sido las mejoras técnicas en los robots debidas al avance en Microelectrónica e Informática. Los Estados Unidos han vendido muchas de sus empresas de robots a Europa y Japón o a sus filiales en otros países.
En 1987 se fundó la Federación Internacional de Robótica (International Federation of Robotics, IFR) con sede en Estocolmo, Suecia, la Robótica Industrial, patentó en 1948, un robot manipulador programable el cual fue el germen del robot industrial. Mientras que en 1948 R.C. Goertz, del Argonne National Laboratory, desarrolló, con el objetivo de manipular elementos radioactivos sin riesgo para el operador, el primer tele-manipulador. Éste consistía en un dispositivo mecánico maestro-esclavo. El manipulador maestro reproducía fielmente los movimientos de éste. El operador, además de poder observar a través de un grueso cristal el resultado de sus acciones, sentía a través del dispositivo maestro, las fuerzas que el esclavo ejercía sobre el entorno. (Barral M., 2017)
El mismo autor antes citado manifiesta que durante años los robots han sido considerados útiles sólo si se empleaban como manipuladores industriales. Recientemente han aparecido nuevos y variados papeles para los robots. A diferencia de los tradicionales robots fijos de manipulación y fabricación, estos nuevos robots móviles pueden realizar tareas en un gran número de entornos distintos y se les conoce como robots de servicio. Los robots de servicio se emplean en la investigación científica, en la educación, con fines de bienestar personal y social, etc. Son especialmente adecuados para el trabajo en áreas demasiado peligrosas para la vida humana o para la exploración de lugares anteriormente vetados al ser humano. (Víctor R. González, 2019)
“Este crecimiento revolucionario en el empleo de robots como dispositivos prácticos es un indicador de que los robots desempeñarán un importante papel en el futuro. Los robots del futuro podrán relevar al hombre en múltiples tipos de trabajo físico.” (Víctor R. González, 2019)
¿Todas las máquinas autónomas son robots?
Barral Miguel (2016) declara: Otro punto importante a considerar es el siguiente: existen diferentes grados de inteligencia autónoma. No es difícil programar a una máquina para que responda a un único entorno, simple y controlado. Sin embargo, el mundo no es simple, sino tremendamente complejo y tampoco es controlado, es altamente variable e impredecible. A medida que los algoritmos de machine learning sean cada vez más sofisticados, los robots dotados con este tipo de inteligencia responderán a su entorno de formas más complejas e impredecibles y sin que hayan sido enseñados explícitamente por un humano. Es decir, su inteligencia se “humanizará”. Este sí será el robot que Spielberg imaginaba para su película A.I Inteligencia artificial.
“Un robot capaz de reaccionar ante lo impredecible y de aprender del entorno. Un robot que responde ante el cosmos de posibilidades que el mundo genera a cada segundo.” (Víctor R. González, 2019)
Prospección de Futuro
En el ámbito industrial, se camina hacia soluciones integrales donde el robot no se plantea nunca como solución aislada, sino que forma parte de un proceso global, donde intervienen la gestión, el diseño, la fabricación, el control de calidad, etc., de forma interconectada. (Víctor R. González, 2019)
(Víctor R. González, 2019) expresa que, “por otra parte, los nuevos ámbitos de implantación de robots espaciales y de servicios, constituyen un reto permanente, y cualquier avance sustancial en estos nuevos dominios revierte sobre los demás.”
Siguiendo con el tema conforme la tecnología avanza, se incorporan al robot nuevas posibilidades, fundamentalmente a partir de la percepción de su entorno, cada vez más potente y sofisticada, favoreciendo e impulsando nuevas capacidades, como la toma de decisiones de alto nivel, propiciada por técnicas propias de la IA. La prueba más evidente del enorme progreso de la robótica, reside en el hecho de que se está implantando robots en áreas absolutamente impensables hace bien poco, por ejemplo, para asistencia en operaciones quirúrgicas, incluso a distancia (“telesurgering”), o su uso, cada vez mayor, en nuevos sectores de la industria alimentaria, farmacológica, etc.
Es interesante, comentar la existencia de algunos proyectos de investigación que están, actualmente, en vanguardia, y que preparan una generación de robots y sistemas robotizados, en general, muy por delante de lo conseguido hasta ahora. (Miguel Barral, 2016)
Sí en un principio el entorno se adaptaba al robot, estructurándolo de forma que facilitara su implantación para resolver una tarea, ahora la tendencia es la contraria, es decir, que el robot se adapte al entorno, en la medida que la tecnología lo permita. (Miguel Barral, 2016)
Usos de los Robots
En la actualidad, los robots comerciales e industriales son ampliamente utilizados, y realizan tareas de forma más exacta o más barata que los humanos. También se les utiliza en trabajos demasiado sucios, peligrosos o tediosos para los humanos. Los robots son muy utilizados en plantas de manufactura, montaje y embalaje, en transporte, en exploraciones en la Tierra y en el espacio, cirugía, armamento, investigación en laboratorios y en la producción en masa de bienes industriales o de consumo. (Atom, 2017)
Recientemente, se ha logrado un gran avance en los robots dedicados a la medicina, con dos compañías en particular, Computer Motion e Intuitive Surgical, que han recibido la aprobación regulatoria en América del Norte, Europa y Asia para que sus robots sean utilizados en procedimientos de cirugía invasiva mínima. Desde la compra de Computer Motion (creador del robot Zeus) por Intuitive Surgical, se han desarrollado ya dos modelos de robot daVinci por esta última. En la actualidad, existen más de 800 robots quirúrgicos daVinci en el mundo, con aplicaciones en Urología, Ginecología, Cirugía general, Cirugía Pediátrica, Cirugía Torácica, Cirugía Cardíaca y ORL. También la automatización de laboratorios es un área en crecimiento. Aquí, los robots son utilizados para transportar muestras biológicas o químicas entre instrumentos tales como incubadoras, manejadores de líquidos y lectores. Otros lugares donde los robots están reemplazando a los humanos son la exploración del fondo oceánico y exploración espacial. Para esas tareas se suele recurrir a robots de tipo artrópodo. (Atom, 2017)
Ventajas de los robots
Zelinski Peter (2018) interpreta que los robots pueden bajar hasta los lugares desconocidos donde los humanos serían aplastados, pueden darnos la información que los humanos no pueden obtener, pueden trabajar en lugares 24 horas al día, 7 días a la semana sin salario ni comida, además no se aburren. Los robots pueden realizar las tareas más rápido que los humanos y de manera mucho más consistente y precisa, se vuelven más comunes cada día, las mascotas robóticas pueden ayudar a los pacientes con depresión y los mantienen activos.
La mayoría de los robots son automáticos, por lo que pueden moverse sin ninguna interferencia humana, pueden entretenernos y ayudarnos en ciertas tareas, puedes enviarlos a un entorno peligroso como el mar profundo o las zonas de guerra. (Peter Zelinski, 2018)
Usted puede utilizar robots para producir los productos en las fábricas, tales como el montaje de los coches, también se puede utilizar para construir las piezas de muchos productos, tales como las piezas de aviones, las piezas de coches y los suministros de construcción. Los robots pueden soportar un ambiente hostil de espacio interplanetario, están hechos para que las atmósferas planetarias no afecten su estado físico y rendimiento, pueden reemplazar a los seres humanos en muchas áreas de trabajo, pueden asumir mayores responsabilidades y pueden ser programados para manejarse por sí mismos. (Peter Zelinski, 2018)
El autor antes nombrado explica que los robots pueden ser programados para alcanzar el nadir de la Tierra, pueden ser usados para excavar en busca de combustibles, pueden ser usados para propósitos mineros, pueden ser aprovechados para explorar las profundidades de los océanos, pueden ser usados para superar las limitaciones que los humanos tienen.
Los robots se pueden utilizar para realizar tareas repetitivas y que consumen mucho tiempo de forma eficiente, se utilizan para realizar tareas peligrosas, pueden ajustar sus parámetros como la velocidad y el tiempo, pueden actuar con rapidez, sin verse afectados por los factores que afectan a los seres humanos. (Peter Zelinski, 2018)
“Los robots están diseñados para trabajar en ambientes hostiles como en el espacio, sin aire, bajo el agua y en el fuego, pueden ser utilizados en lugar de las personas cuando la seguridad humana es una preocupación, pueden venir en cualquier tamaño, cualquier tamaño necesario para cualquier tarea puede ser creado.” (Peter Zelinski, 2018)
Programación basada en autómatas
Como concepto básico de la programación estructurada en autómatas es conocida como “estado”. El principal estado del sistema es muy específico el cual es "separar" el futuro del pasado en el sentido de que el estado contiene toda la información posible sobre el pasado del sistema que es necesaria para determinar cada una de sus reacciones frente a toda acción que se puede generar en cualquier instante.
(Merlin M, 2017) Al utilizar la palabra “estado”, no hace falta que el conocimiento de los datos históricos, puede ser considerado como una característica especial para combinar todas las acciones de entrada del pasado las cuales afectan a la reacción de la entidad en el presente, además la reacción no solo depende de la acción de entrada y del estado actual.
Determinando que el concepto de "acción de entrada" es también considerado como uno de los conceptos de la programación basada en los autómatas, esta acción de entrada es normalmente siempre es un vector, haciendo que sus componentes se dividen en eventos y variables de entrada, dependiendo del mecanismo de generación. (Merlin M, 2017)
Considerando que la combinación del conjunto finito de los estados y el conjunto finito de las acciones de entrada constituyen en un autómata (finito) sin salida, dicho esto un autómata reacciona a las acciones de entrada cambiando su estado actual de una forma específica. Además, las reglas por las que pueden cambiar los estados se las conoce como funciones de transición automatizadas..
En cuanto a lo que se conoce como automatización (finita) dentro de la programación basada en autómatas es esencialmente la combinación de "autómatas sin salida" y "acciones de entrada". Siendo el autómata el que reacciona a la acción de entrada no solo cambiando su estado sino también generando ciertos valores en las salidas, y estas reglas para generar las acciones de salida se las denomina como de salida del autómata. (Merlin M, 2017)
Al elaborar un diseño de un sistema con cada uno de su comportamiento complejo es necesario tomar como punto de partida cada objeto de control existentes con un determinado conjunto de operaciones y conjuntamente con un grupo dado de eventos los cuales pueden surgir en el entorno externo (mercado).
Características
Todo autómata posee una estructura de interruptor (de hecho, está virtualmente compuesto de ella) lo cual comprende todas las operaciones lógicas. Cuando se llama a un autómata el control se traduce a una de las etiquetas de la "instancia" y esto hace que las acciones correspondientes se completen hasta el nuevo inicio la operación del autómata. Además, estas acciones consisten en comprobar cada una de las condiciones de la transición y si estas se cumplen, se llama a la condición y esta ejecuta la respectiva función de salida cambiando el estado del autómata. (Merlin M, 2017)
La implementación de un autómata no es simple sino más importante aún, el programa puede funcionar sin demasiadas variables locales intermedias, para que así la funcionalidad en cada autómata sea proporcionada por una variable de estado de valores múltiples, jugando el algoritmo un papel importante en la creación de la parte lógica de un autómata.
Tipos de autómatas
La teoría de autómatas estudia las máquinas abstractas y los problemas que éstas son capaces de resolver, debido a que está muy relacionada los autómatas son clasificados a menudo por la clase de lenguajes formales que son capaces de reconocer.
Autómatas finitos
Un autómata finito (AF) puede ser descrito como una 5-tupla. Existen varios tipos de autómatas finitos
Autómata finito determinista (AFD)
Cada estado de un autómata de este tipo puede o no tener una transición por cada símbolo del alfabeto.
Autómata finito no determinista (AFND)
Los estados pueden, o no, tener una o más transiciones por cada símbolo del alfabeto. Si una transición no está definida, de manera que el autómata no puede saber cómo continuar, la palabra es rechazada.
Los autómatas más potentes pueden aceptar lenguajes más complejos, algunos de estos autómatas son:
Autómata con pila
Son máquinas idénticas a los AFD, con la diferencia que disponen de una memoria adicional, haciendo uso de una pila. Este tipo de autómatas aceptan los lenguajes independientes del contexto.
Autómata linealmente acotado:
Se trata de una máquina de Turing limitada.
Máquina de Turing:
Son las máquinas computacionales más potentes. Poseen una memoria infinita en forma de cinta, así como un cabezal que puede leer y cambiar esta cinta, y moverse en cualquier dirección a lo largo de la cinta. (Jorge Luis Montes, 2017)
Cosas de humanos que los autómatas pueden hacer
Dentro de los pronósticos realizados confirman que los autómatas podrán hacer todo lo que los humanos hacemos de una forma más rápida, efectiva y barata.
Repartir y entregar paquetes:
Estos autómatas son aparatos, que ya se han sido probado en unas 60 ciudades, los cuales están elaborados para repartir comida a domicilio o libros de biblioteca, pero estos están equipados prácticamente con las mismas tecnologías que poseen los coches sin conductor como son cámaras, sensores y satélite GPS para poder moverse libremente por las calles.
Realizar operaciones médicas
En este caso el sistema robótico se convierte en los brazos y en los ojos del verdadero médico. El cual le permite poder efectuar las complicadas operaciones a distancia y disponer de cirujanos especializados que se hallan a miles de kilómetros del hospital donde estaba el paciente. (Marco C., 2017)
Visión de futuro
La robótica en general no tiene límites, como podemos apreciar avanza cada día más deprisa, hasta el punto de llegar a dotar a los robots de habilidades muy parecidas a las de los seres humanos. Tal es este desarrollo que se está investigando cada uno de los métodos necesarios para crear un robot que sea capaz de debatir con un ser humano y defender sus argumentos claros, siendo así esto de gran ayuda para posibles misiones no tripuladas, desmantelamiento de centrales nucleares o mantenimiento de redes de ferrocarriles.
La robótica se puede aplicar en numerosos campos, uno de ellos el cual aún no está muy perfeccionado es el que consiste en misiones de salvamento de catástrofes que afecten a los seres humanos, este tipo de robots pueden ser de gran ayuda a la hora de acceder a zonas a las que un ser humano sería incapaz de llegar a sabiendas que el robot debe tener especificada la misión a cumplir.
En los actuales momentos este tipo de robots no se le ha dado confianza, por ende, estos han sido usados de forma tripulada o vigilada minuciosamente, de cierto modo no se lo ha dejado al robot trabajar por sí mismo, estos prototipos son utilizados por los bomberos de Montelibretti, Italia, los cuales han dado buenos resultados, sin olvidar que también fueron utilizados en Fukushima cuando se produjo el accidente en la central nuclear. Sin embargo, el objetivo de estos robots es llegar a un desarrollo donde estos sean capaces de detectar el estrés de las personas que queden atrapadas y actuar en función de ello, teniendo como prioridad el rescate de aquellas que se encuentren en un mal estado psicológico. (Marco C., 2017)
Sensores y percepción
(Marco C., 2017) La incorporación de sensores a los cada uno de los robots se les permite obtener información de su entorno e interaccionar con él, la cual ha sido mucho más lenta de lo previsto, los sensores como son los del tacto que en un momento dado fueron objeto de intensa investigación para realizar la respectiva comercialización en algunos casos. Sin olvidar que no parece demasiado arriesgado para afirmar el desarrollo de la robótica futura, haciendo tanto a cada uno de los robots manipuladores como son los robots móviles, los cuales pasan en gran parte a la incorporación de nuevos y eficientes sensores.
Los robots manipuladores en concreto sirven para tareas de montaje el cual es mecanizado en siendo la pieza manipulada por el robot y el entorno, la utilización de sensores de fuerza puede tener un incremento apreciable. Cabe destacar que la utilización se verá facilitada por el abaratamiento del coste de los sensores y dando las estrategias más eficientes de ejecución de esas tareas que hagan uso efectivo de la información de fuerza.
Métodos
Método histórico-lógico
Se empleó en la construcción del artículo, lo cual permitió realizar una sistematización y determinar las tendencias del objeto de investigación.
Método revisión bibliográfica
Con la aplicación de este método se pudo obtener toda la información con respecto al tema de investigación en libros, revistas de carácter científico, internet que aporten de manera significativa al artículo.
Resultados
Mediante la presente investigación se observó, como ha ido en constante crecimiento cada uso de los autómatas desde el 2018 ha sido considerable, en el 2021, esta cifra ascenderá a unas 630.000 unidades, generando un aumento global un 14% de promedio al año.
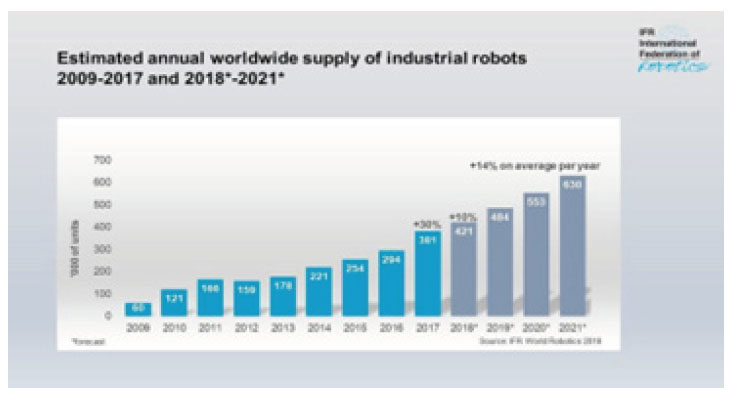
Gráfico 1. Años de crecimiento en la industria robótica
Fuente: Informe Mundial sobre Robots
Conclusión
Después de estudiar e investigar sobre los autómatas de la actualidad y sus ventajas dentro de la sociedad, sin duda alguna es uno de los mayores avances que está viviendo la tecnología en este momento, pues estas ayudan en varios aspectos a la sociedad. Son máquinas que se les da funciones específicas y las cumplen muy bien con precisión, hacen el trabajo pesado facilitando así a las personas tener un trabajo más adaptable.
Las empresas son las beneficiadas debido a las necesidades que esta tenga implementan al autómata en el área específica y este facilita las actividades de trabajo sin descanso alguno y sin necesidad de ser manipulado, porque se le otorga una función y este la lleva a cabo.
Recomendación
Se recomienda tener muy en cuenta cada una de las ventajas, beneficios que los autómatas brindan, para utilizarlas con fines a favor donde se le sacar provecho cabe mencionar que las funcionalidades que se les puedan otorgar son un sinnúmero dependiendo de cada una de las posibles necesidades que se requieran. Con la utilización de estos se obtienen mejoras en las actividades que las personas realizan como son trabajos forzosos y los autómatas de la actualidad pueden cumplir de forma muy eficaz y precisa; con esto se recomienda tener muy en cuenta las nuevas utilidades que pueden cumplir los autómatas.
Cómo citar: Merchan Santisteban, D. J., Maldonado Zuñiga, K., & Pérez Chilán, D. L. (2022). Autómatas en la actualidad y sus ventajas dentro de la sociedad. UNESUM-Ciencias. Revista Científica Multidisciplinaria. ISSN 2602-8166, 6(3), 98-107. https://doi.org/10.47230/unesum-ciencias.v6.n3.2022.476